Ensembles Lessons
Table of Contents
What Are Ensembles?
Definition
An ensemble forecast system is a group of several (typically 20-50) variations of a numerical weather prediction (NWP) model. The resulting model members are analyzed statistically to estimate the probability of a given weather event. Thus, we say that the result is a probabilistic forecast. In contrast, the forecast resulting from a single NWP model run has only one solution, which we call a deterministic forecast.
How Ensembles Are Created
NWP model forecast errors come from two broad sources:
- Uncertainty in the Initial conditions, and
- Errors resulting from model physics (parameterization) or from other model approximations.
As a result, there are two fundamental ways of creating ensemble members. The first is to vary the initial conditions at the start of the model run. The other method is to either use variations of the same model (for example, NCEP's GFS model with different convective parameterization schemes) or completely different models (for example, the GFS and the U.S. Navy's NOGAPS).
Most ensemble members are generated by varying the initial conditions. Small differences in initial conditions grow with time. The model forecast, especially at 3 days or longer, is sensitive to its starting point or initial conditions. This is why modelers expend so much time and energy to getting the best initial conditions possible. But, we can never get a perfect description of the state of the atmosphere nor fully capture initial condition errors. So instead we "perturb" the initial conditions. The forecasts run with these perturbations should give us a range of plausible forecast outcomes that covers potential weather events.
Using multiple models or variations on a single model to generate an ensemble is akin to basing a forecast on multiple deterministic models (for example, NOGAPS, COAMPS, GFS, NAM, ECMWF). Forecasters do this every day, but this alone usually fails to cover the range of plausible weather events. Perturbing the initial conditions is also required.
Why Use Ensembles?
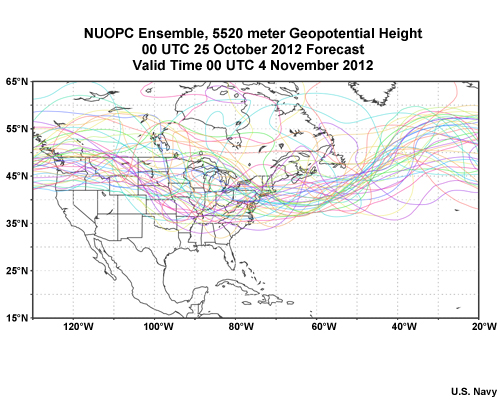
Ensemble products, like the spaghetti diagram above, use various statistical and graphical methods to combine multiple forecast runs, each based on slightly different initial conditions or using slightly different model configurations and/or parameterizations. By doing so, we can determine the level of uncertainty, the most likely forecast outcomes, and the probability of those outcomes. With ensemble prediction products, forecasters now have another level of information to help them make intelligent use of NWP guidance in their forecast process.
EFS Advantages
The following table summarizes the chief advantages of an ensemble forecast system over a single deterministic forecast.
| Characteristic | Single Forecast | Ensemble Forecast System |
|---|---|---|
| Uncertainty in Initial Conditions | Data assimilation system designed to minimize initial condition errors. Can assess initial condition error using satellite and other observations, but cannot assess impact on NWP forecast. | Initial condition uncertainty taken into account by (1) determining the most important potential errors to the model forecast and then (2) using that information to generate initial condition perturbations. |
| Atmospheric Predictability | Cannot be assessed from a single deterministic forecast. Can be incompletely inferred from the degree of consistency between consecutive model forecast runs or differences among forecasts from different models. | Can be assessed by the rate of growth in spread among ensemble member forecasts. Requires adequate ensemble size and spread to obtain an accurate measure of predictability. |
| Model Uncertainty: Dynamics | Only one numerical method can be used (for example, spectral or grid point). | Multimodel ensembles can use multiple numerical methods (for example, spectral and grid-point). |
| Model Uncertainty: Physics | Only one set of physical parameterizations can be used (for example, one convective precipitation scheme). | Multiple combinations of physical parameterizations can be used (for example, two types of convective precipitation schemes). |
EFS Limitations
While EFSs have the advantage of giving the forecaster probabilistic forecast information based on the uncertainty in the initial condition and in some cases, the forecast model used, there are limitations to these probabilistic forecast tools.
The following table summarizes some limitations of ensemble forecast systems and ways to mitigate some of these limitations.
| Configuration | Limitation | Mitigation |
|---|---|---|
| One model EFS | Lack of diversity in model dynamics and physics increases the likelihood that the range of forecast outcomes will not include the observed weather. This can be especially important for extreme events. |
|
| Multi-model EFS | Forecast outcomes may group or “cluster” together by model; that is, one or more of the EFS models creates a distinct set of forecasts that doesn’t overlap with the other models |
|
| All EFS configurations | Tend to have too little spread and may miss potential high-impact events |
|
| Coarser resolution than their deterministic counterparts | While not mitigation per se, features captured at higher resolution are harder to predict, especially past day 3. Removing them by using the ensemble mean gives a better forecast for features the EFS can resolve. |