Objetivos
- Enumerar los principales tipos de modelos de olas cerca de la costa.
- Describir la salida de los diferentes tipos de modelos de olas.
- Describir en qué difiere el modelo SWAN de los modelos de olas en aguas profundas, como WAVEWATCH III y WAM.
- Enumerar las fuentes y los sumideros de la energía de las olas en el modelo SWAN.
- Describir los procesos físicos que se simulan en SWAN para propagar las olas con exactitud.
- Enumerar los tipos de condiciones iniciales de una simulación del modelo SWAN.
- Explicar qué condiciones iniciales son imprescindibles y en qué circunstancias.
- Enumerar las fuentes de datos de las condiciones iniciales de una corrida del modelo SWAN y describir cómo se aplican dichas condiciones iniciales.
- Describir la diferencia entre ejecutar SWAN en modo estacionario y no estacionario.
- Enumerar las ventajas y las desventajas de los modos de SWAN.
- Describir las fuentes de error de las simulaciones del modelo SWAN.
- Describir cómo funciona el modelo Surf estándar de la Armada de los Estados Unidos y en qué difiere del modelo SWAN.
- Enumerar los parámetros de salida del modelo Surf estándar de la Armada de los Estados Unidos.
- Describir las suposiciones del modelo Surf estándar de la Armada de los Estados Unidos.
Introducción
¿Por qué modelamos las olas?

En todos los litorales del mundo, las olas marinas rompen contra la costa a intervalos de pocos segundos. Estas olas pueden impactar la seguridad pública, el comercio, la navegación y, por supuesto, nuestras actividades de esparcimiento. Hace ya más de dos décadas que el deseo de predecir estas olas impulsa nuestros intentos de modelarlas. Estos modelos aportan muchos beneficios aparte de la capacidad de encontrar las mejores olas para el surf:
- los modelos de olas se usan operativamente para predecir las condiciones de olas durante las operaciones en alta mar;
- las predicciones de oleaje en aguas costeras nos permiten navegar con seguridad al entrar y salir de los puertos;
- los modelos de olas cerca de la costa se pueden usar durante la fase de diseño de estructuras como muelles y malecones para simular su eficacia;
- los modelos de olas cerca de la costa son un componente importante de los modelos de inundaciones costeras, los cuales pretenden simular la marejada ciclónica de los huracanes. Además, el crecimiento de las olas puede alterar profundamente los vientos y los procesos de capa límite de los huracanes.
Modelos de olas
Existen varios tipos de modelos de olas. En esta lección nos centraremos en los modelos que simulan las olas cerca de la costa, es decir, las olas en aguas someras (poco profundas), que interactúan con el fondo marino. Si usted no conoce las características y la física básica de las olas en aguas someras, le recomendamos que antes de continuar estudie la lección de COMET titulada Olas en aguas someras.
Los modelos que simulan las olas cerca de la costa se pueden subdividir en dos clases generales:
- modelos de resolución de fase y
- modelos espectrales.
Además, los modelos de olas cerca de la costa pueden ser:
- unidimensionales (1D) o
- bidimensionales (2D)
Esta lección primero describe brevemente los modelos unidimensionales, bidimensionales de resolución de fase y espectrales bidimensionales, y luego presenta dos modelos operativos: SWAN y el modelo Surf estándar de la Armada de los Estados Unidos.
Modelos unidimensionales (1D)
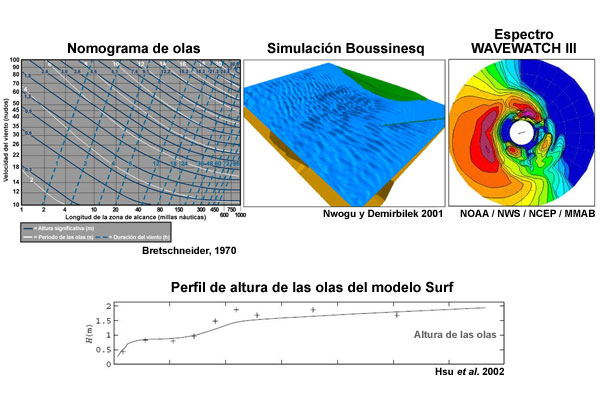
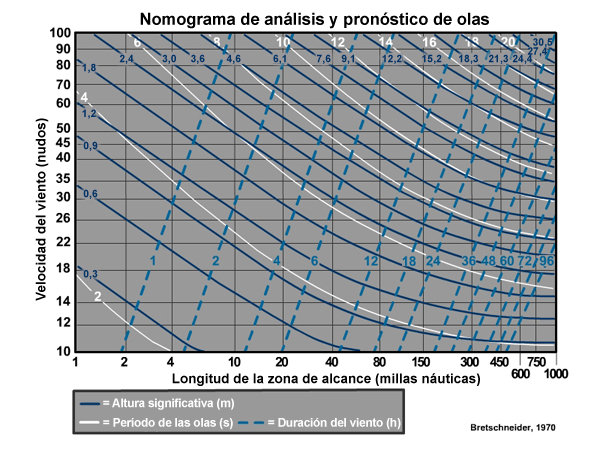
Los modelos de olas más simples son los llamados modelos unidimensionales (1D). Estos modelos predicen las olas a lo largo de una trayectoria, que suele ser una recta. Los modelos unidimensionales más simples predicen la altura significativa y el período de las olas a partir de la velocidad, la longitud de la zona de alcance, o fetch, y la duración del viento bajo condiciones muy ideales: en aguas muy profundas, con vientos constantes y en ausencia de efectos costeros. Este nomograma de olas es un ejemplo de un modelo unidimensional simple. Dada la velocidad del viento, si conocemos la longitud de la zona de alcance o la duración del viento podemos estimar la altura significativa y el período de las olas. Un modelo como este es adecuado para realizar cálculos rápidos, por ejemplo, a la hora de tomar una decisión en el campo, sin tener acceso a un equipo informático conectado a internet. La simplificación extrema de estos modelos significa que se limitan a producir cálculos muy aproximados.
Los modelos 1D más complejos, como el modelo Surf de la Armada de los Estados Unidos (Navy Standard Surf Model, NSSM, o SURF), describen las características de la zona de rompiente sobre la base de la batimetría y las características de las olas entrantes. Estos modelos son lo suficientemente ágiles para poder ejecutarse en una computadora portátil, lo cual significa que se pueden usar fácilmente en operaciones de campo. Describiremos el modelo Surf más en detalle en una sección posterior de esta lección.
Modelos bidimensionales (2D) de resolución de fase (modelos Boussinesq)
Los modelos bidimensionales simulan las olas en una región dada que denominamos «dominio del modelo». Los modelos de resolución de fase simulan cada una de las olas en el dominio del modelo. Para hacerlo, necesitan un mínimo de 5 puntos de malla por longitud de onda, de modo que requieren una malla muy fina, con un espaciado del orden de pocos metros. Debido a su alta resolución, normalmente el uso de estos modelos se limita a los estudios de ingeniería que necesitan examinar las condiciones de olas en pequeñas zonas costeras.
Los modelos 2D de resolución de fase, que también se conocen como modelos Boussinesq, simulan la propagación del oleaje y las olas de viento al pasar de aguas profundas a aguas someras. Al hacerlo, pueden tener en cuenta los siguientes procesos hidrodinámicos:
- asomeramiento
- refracción
- difracción
- reflexión y transmisión
- fricción de fondo
- interacciones entre las olas y las corrientes
- interacciones no lineales entre las olas
- rotura de las olas y altura máxima de penetración
- corrientes inducidas por las olas
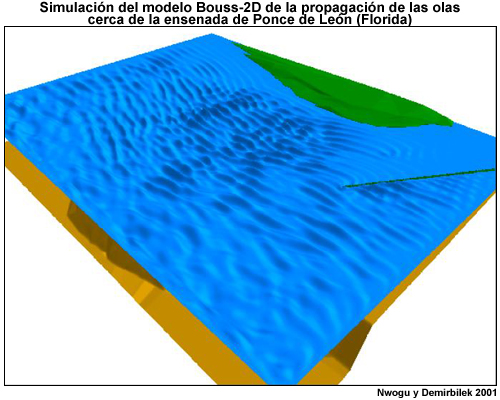
El Cuerpo de Ingenieros del Ejército de los Estados Unidos (U.S. Army Corps of Engineers, USACE) desarrolló un modelo Boussinesq llamado Bouss-2D para uso en sus estudios de ingeniería. Esta figura muestra el resultado de una simulación para la ensenada de Ponce de León, en Florida. Típicamente, las corridas del modelo duran justo lo suficiente como para capturar la gama completa de las interacciones entre las olas y la costa, el fondo, las corrientes, las estructuras y las demás olas. Los resultados de estas simulaciones ayudan a diseñar o modificar las estructuras para lograr los efectos deseados.
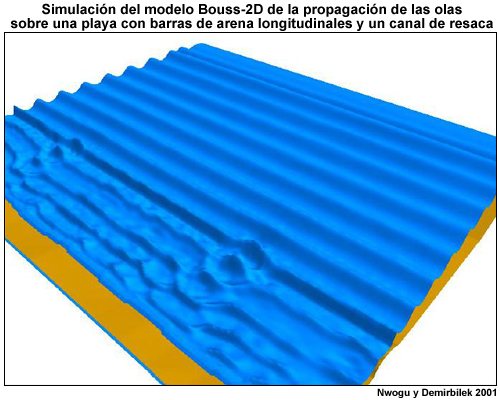
Los modelos Boussinesq de olas se utilizan también para estudiar los procesos litorales. Este ejemplo muestra las olas que rompen contra una playa que está al otro lado de una barra de arena sumergida que se interrumpe en dos lugares, donde dos corrientes de resaca han creado sendos canales. Cuando las olas llegan a la playa, rompen de manera diferente sobre los canales de las corrientes de resaca, debido al efecto de la corriente contrapuesta y a la mayor profundidad del fondo del mar. Estos tipos de modelos nos permiten estudiar los patrones de circulación junto a la costa a fin de comprender la dinámica de las corrientes de resaca. Tales conocimientos pueden ayudarnos a predecir mejor las corrientes de resaca, a mitigar el peligro que representan y a reducir el número de muertes.
Modelos bidimensionales (2D) espectrales
Los modelos bidimensionales espectrales simulan las propiedades estadísticas de los campos de olas. En otras palabras, en lugar de predecir las olas individuales, como los modelos Boussinesq, los modelos espectrales predicen las propiedades estadísticas del campo de olas. Los modelos espectrales presuponen que las condiciones de olas cambian lentamente, tanto en el espacio como en el tiempo, motivo por el cual no son adecuados para uso en áreas pequeñas, como un puerto, donde los modelos Boussinesq dan mejores resultados.
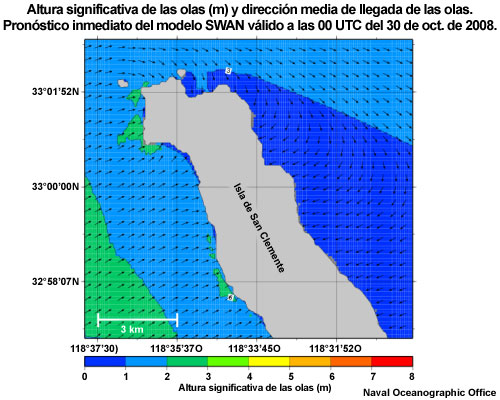
Este ejemplo generado con un modelo espectral muestra la altura significativa de las olas en la punta norte de la isla de San Clemente, junto a la costa del sur de California (EE.UU.).
¿Cómo funcionan los modelos espectrales?
En el océano, las olas que vemos en un momento dado son el resultado de una combinación de olas de viento locales y oleajes de origen más o menos lejano. Esto produce distintos campos de olas que viajan cada uno por su propio rumbo y con frecuencias y niveles de energía propios. Esta animación muestra dos campos de olas independientes, similar a lo que ocurre cuando se superponen olas de viento de período corto a un oleaje de período largo.
Esta combinación compleja de campos de olas se puede representar en un diagrama polar del espectro de las olas, en el cual la energía de las olas se traza según su dirección y frecuencia. Los campos de olas aparecen como «zonas calientes» en estos diagramas. Para rastrear la energía de las olas a medida que crecen, se disipan o se propagan a través de su dominio, los modelos bidimensionales espectrales emplean un espectro de energía de las olas en cada punto de malla del dominio del modelo.
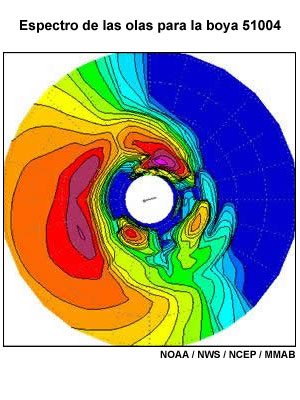
Encontrará información adicional sobre cómo interpretar estos diagramas espectrales de olas en la lección de COMET titulada Analyzing Ocean Swell.
Preguntas
Pregunta 1
¿Cuáles de estos tipos de modelos de simulación de las olas cerca de la costa pueden generar un mapa de la altura significativa de las olas? (Elija todas las opciones pertinentes.)
Las respuestas correctas son b) y c).
Los modelos bidimensionales cubren un área, a diferencia de los modelos unidimensionales, que predicen las propiedades de las olas a lo largo de una trayectoria, que suele ser una recta.
Pregunta 2
¿Cuál de estos modelos requiere la resolución más alta? (Elija la mejor respuesta.)
La respuesta correcta es a).
Los modelos Boussinesq (de resolución de fase) simulan cada una de las olas. Para hacerlo requieren 5 puntos de malla por longitud de onda, lo cual implica un espaciado de malla del orden de 10 metros o menos.
Pregunta 3
El modelo Surf estándar de la Armada de los EE.UU. es un _____. (Elija la mejor respuesta.)
La respuesta correcta es a).
El modelo Surf de la Armada de los EE.UU. es un sofisticado modelo unidimensional (1D) que toma en cuenta la batimetría local y el espectro de energía de las olas entrantes.
Pregunta 4
¿Verdadero o falso? Normalmente, los modelos Boussinesq se utilizan para los pronósticos operativos de oleaje.
La respuesta correcta es Falso.
Debido a la densidad de la malla utilizada por los modelos Boussinesq, su uso se limita a zona pequeñas, como puertos. Por eso se utilizan principalmente para realizar estudios de ingeniería y de investigación.
El modelo SWAN
SWAN (Simulating WAves Nearshore) es un modelo espectral de simulación de las olas cerca de la costa que fue desarrollado en la Universidad Tecnológica de Delft, en Holanda (Booij et al., 1999). El modelo se ha actualizado extensamente en el transcurso de los años y se ha adoptado ampliamente:
- El modelo SWAN es la herramienta principal de predicción de las olas cerca de la costa de la NOAA, la Armada y varias otras agencias de los Estados Unidos.
- SWAN se utiliza para investigar los procesos oceánicos.
- También es frecuente acoplar SWAN a otros modelos para integrar un sistema completo de modelado del litoral.
SWAN difiere de los modelos de olas en aguas profundas en varios aspectos:
- contiene la física que simula los procesos que ocurren en aguas someras;
- se ejecuta a una resolución más alta para tener en cuenta las variaciones batimétricas;
- en términos numéricos, la propagación en SWAN usa una técnica de parametrización más estable, pero más exigente en cuanto a cómputo, en lugar de una simulación;
- SWAN se ejecuta a menudo en un modo «estacionario» que se contrapone al modo de «incremento de tiempo».
Estas diferencias se explicarán más en detalle en las próximas páginas de esta sección, que también le enseñarán a interpretar los productos de pronóstico generados por el modelo SWAN. En la sección final estudiaremos el modelo Surf estándar de la Armada de los EE.UU. y destacaremos las diferencias entre dicho modelo y SWAN.
Fuentes y sumideros de la energía de las olas
En aguas someras, seis procesos contribuyen al crecimiento y la disipación de las olas. Estos procesos, que denominamos «fuentes» y «sumideros», son el crecimiento de las olas por acción del viento, la atenuación de las olas por formación de una cresta espumosa o descrestamiento, la fricción de fondo, la rotura de las olas inducida por el cambio de profundidad y la transferencia no lineal de la energía de las olas a través de interacciones triples (entre tres olas) y cuádruples (entre cuatro olas). A diferencia de los modelos de olas en aguas profundas, que solo tienen en cuenta algunos de estos procesos, SWAN los representa todos.
Crecimiento de las olas por acción del viento
En el modelo SWAN, el viento genera todos los componentes de las olas. El crecimiento de las olas por acción del viento depende de varios factores:
- la altura, el período y la dirección de las olas existentes;
- el ángulo entre la dirección del viento y dichas olas; y
- la razón entre la velocidad del viento y la velocidad de fase de las olas.
Encontrará información detallada sobre el crecimiento de las olas en la lección de COMET titulada Ciclo de vida de las olas I: generación.
Descrestamiento
El proceso de atenuación de las olas por formación de una cresta espumosa o descrestamiento no depende principalmente de la profundidad del agua, sino de la pendiente o peralte de las olas (es decir, la razón entre la altura de la ola y su longitud). La formación de una cresta espumosa es un proceso imprescindible para limitar la altura de las olas, que sin él crecerían sin parar por la acción del viento.
Fricción de fondo
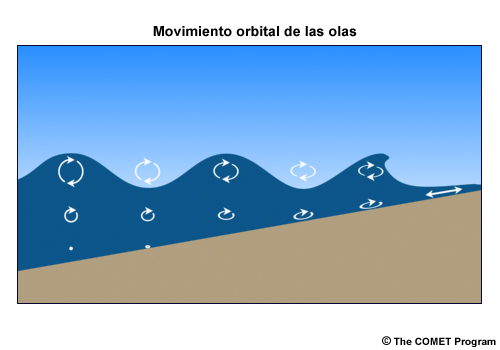
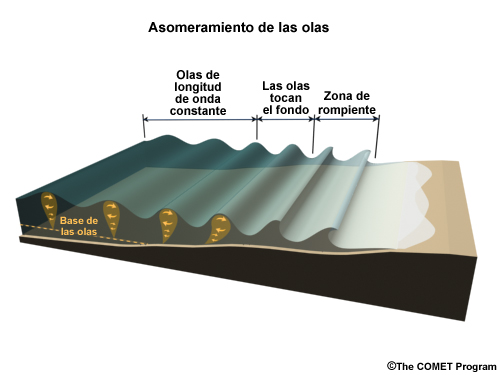
En alta mar, el paso de las olas superficiales produce movimientos casi circulares de las partículas de agua. Debajo de la superficie del agua, el tamaño de estos movimientos orbitales disminuye gradualmente con la profundidad, hasta medir aproximadamente la mitad de la longitud de onda. Cuando las olas se adentran en aguas someras, estas órbitas tocan el fondo. La fricción entre el movimiento orbital y el fondo disipa la energía de las olas. El grado de disipación depende principalmente de la velocidad del movimiento orbital y de la rugosidad del fondo.
Normalmente, el modelo SWAN se ejecuta con los valores de rugosidad predeterminados, que corresponden a un fondo marino arenoso, pero se pueden asignar valores de rugosidad más altos, correspondientes a otros tipos fondos marinos.

Por ejemplo, el coeficiente de arrastre de un arrecife coralino es al menos 10 veces mayor que el de un fondo marino arenoso. La rugosidad del fondo marino se puede cambiar en la malla del modelo, si se considera que esto mejoraría sustancialmente la calidad del pronóstico de olas.

Rotura inducida por el cambio de profundidad (asomeramiento)
Cuando las olas se aproximan al litoral, el asomeramiento provoca el aumento de su altura. Cuando la altura significativa de las olas excede aproximadamente la mitad de la profundidad, las olas comienzan a romper. La cantidad de olas que rompen se incrementa a medida que aumenta la razón entre la altura de las olas y la profundidad. En la zona de rompiente, este proceso prevalece sobre todos los demás.
Interacciones entre las olas
Las interacciones entre las olas (ola-ola) son el producto del intercambio de energía entre dos conjuntos de olas casi resonantes, lo cual produce el efecto de redistribuir la energía a lo largo del espectro. Aunque no se obtiene ni se pierde energía, parte de la energía pasa a frecuencias o períodos de olas diferentes.
En aguas muy poco profundas, las interacciones triples son un aspecto importante para las olas empinadas. Las interacciones triples afectan la forma de las olas en la zona de asomeramiento y de las olas rompientes; además, ayudan a determinar si se trata de rotura en voluta (plunging), por descrestamiento (spilling) o por oscilación (surging). Las tríadas no se incluyen en los modelos de olas en aguas profundas como WAVEWATCH III o WAM.
En aguas profundas, las interacciones cuádruples dominan la evolución del espectro. Las interacciones cuádruples entre las olas constituyen el único proceso que convierte las olas de viento de período corto en oleaje de período largo. Todos los modelos de olas en aguas profundas incluyen las interacciones cuádruples.
Preguntas
Pregunta 1
¿Cuáles de estos factores aumentan la energía de las olas? (Elija todas las opciones pertinentes.)
La respuesta correcta es a).
Solo el viento aumenta la energía total de las olas en los modelos de olas.
Pregunta 2
¿Cuáles de estos factores disipan la energía de las olas? (Elija todas las opciones pertinentes.)
Las respuestas correctas son b), c) y d).
El viento aumenta la energía de las olas y las interacciones no lineales entre las olas transfieren la energía de las olas dentro del espectro de olas; por otra parte, los procesos de formación de una cresta espumosa, fricción de fondo y rotura disipan la energía de las olas.
Pregunta 3
¿Cuál es la propiedad que controla principalmente la formación de una cresta espumosa? (Elija la mejor respuesta.)
La respuesta correcta es b).
Aunque la velocidad del viento aumenta la altura de la ola y puede conducir a olas más empinadas, la pendiente o peralte de la ola controla la formación de una cresta espumosa.
Pregunta 4
¿De cuáles de estos factores depende la cantidad de disipación provocada por la fricción de fondo? (Elija todas las opciones pertinentes.)
Las respuestas correctas son a) y b).
Las interacciones entre los movimientos orbitales y el suelo marino determinan el grado de disipación por fricción de fondo. Los aumentos en la velocidad del viento y la altura de las olas pueden contribuir a mayores velocidades orbitales, pero no necesariamente.
Pregunta 5
En la zona de rompiente, ¿cuál es el proceso que disipa la mayor parte de la energía de las olas? (Elija la mejor respuesta.)
La respuesta correcta es c).
En la zona de rompiente, la acción de las olas rompientes predomina sobre todos los demás procesos de disipación de la energía de las olas.
Pregunta 6
¿Cuáles de estas son características de las interacciones triples no lineales entre las olas? (Elija todas las opciones pertinentes.)
Las respuestas correctas son a) y c).
Las interacciones triples afectan la forma de los asomeramientos pronunciados y de las olas rompientes en aguas someras. Esto contribuye a determinar los tres tipos de rotura: en voluta (plunging), por descrestamiento (spilling) y por oscilación (surging).
¿Cómo se propagan las olas en el modelo SWAN?
A diferencia de las fuentes y los sumideros que vimos en la sección precedente, que tienen en cuenta cómo cambian las olas en una celda de la malla, la propagación de las olas determina cómo la energía de las olas pasará de una celda de la malla a las celdas vecinas. Para lograrlo con precisión junto al litoral, el modelo SWAN debe tener en cuenta la batimetría, los obstáculos y las corrientes.
Batimetría
En aguas profundas, el modelado de la propagación de las olas es principalmente un ejercicio de contabilidad. En un incremento de tiempo, una determinada fracción de la energía de las olas en una celda de la malla se transmite a una celda vecina. Qué fracción depende de la dirección de avance de los distintos componentes de las olas, su velocidad de viaje y la energía de los componentes de las olas. En aguas someras, la propagación es más compleja.
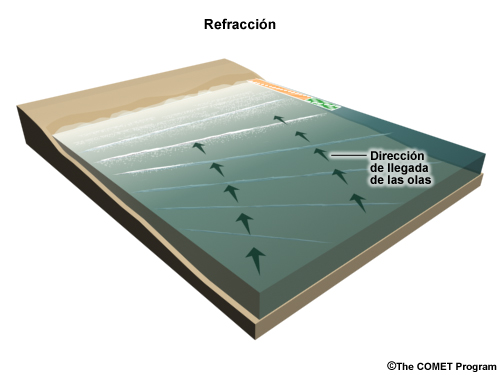
Cuando las olas llegan a una zona de aguas someras, comienza el proceso de asomeramiento y las olas pierden velocidad. Si la cresta de una ola que se adentra en aguas poco profundas no es paralela a las líneas de batimetría o isóbatas, la ola se refracta y trata de alinearse en sentido más paralelo a las isóbatas. Todos los modelos de olas cerca de la costa deben simular la refracción.
En esta simulación del modelo SWAN es evidente la refracción que ocurre alrededor de la isla de San Clemente, junto a la costa del sur de California. La refracción de las olas que viajan hacia el este alrededor de la punta norte de la isla es tal que llegan a avanzar hacia el oeste, pero solo después de haber perdido gran parte de su altura. En la costa oeste de la isla se nota la dispersión en abanico de las olas que penetran una pequeña bahía. Observe también que el asomeramiento produce olas más altas en varios lugares a lo largo del litoral oeste.
Obstáculos
En el contexto de un modelo de olas, cuando hablamos de obstáculos nos referimos a las estructuras de un tamaño menor que una celda de la malla del modelo. Dado que el modelo desconoce la existencia de estas estructuras, es preciso colocarlas en la malla en forma de obstáculos. Típicamente, se trata de estructuras largas y angostas. Algunos obstáculos, como los rompeolas, son fabricados, mientras que otros son naturales, como los arrecifes.

Los obstáculos afectan el campo de olas de tres maneras:
- bloquean y reflejan las olas;
- si están sumergidos, reducen la altura de las olas;
- provocan difracción en sus extremos.
Reflexión
Es común que las olas se reflejen en muelles o rompeolas. Dependiendo de su naturaleza, el obstáculo —que puede variar de una superficie lisa a una escollera— genera olas reflejadas entre muy coherentes y muy dispersas. En esta fotografía aérea se observan las olas incidentes en un rompeolas, provenientes de la izquierda inferior, y un tren muy coherente de olas reflejadas que se dirige hacia la derecha inferior. El modelo SWAN permite configurar ciertos parámetros para tener en cuenta estas respuestas, así como otras reflexiones más dispersas.

Difracción
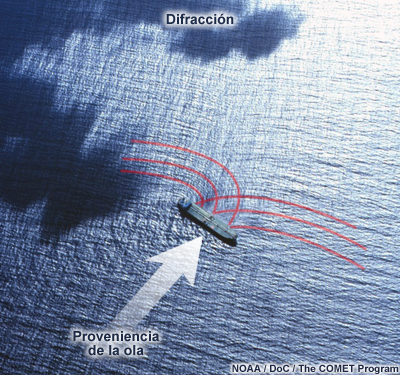
La difracción de las olas se manifiesta cuando las crestas de las olas cambian de dirección en torno a un obstáculo. Al igual que con la luz, la energía de las olas puede difractarse y «doblar la esquina» hasta llegar al lado opuesto de un objeto. La difracción de las olas ocurre en el lado de sotavento de las islas pequeñas y los rompeolas. Esta foto muestra el efecto de la difracción en los extremos de un buque anclado.
Si bien el modelo SWAN es capaz de aproximar los efectos de la difracción, esto no es siempre necesario. En los campos irregulares de olas con crestas pequeñas, que ya de por si contienen bastante dispersión direccional, el efecto de la difracción es pequeño, excepto en proximidad del extremo de una estructura.
Corrientes
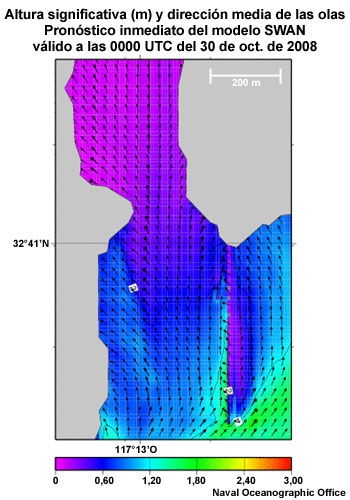
Las corrientes juegan un papel importante en la forma del oleaje cerca del litoral. En alta mar, muy pocos lugares del mundo presentan corrientes cuya magnitud puede afectar las olas de forma significativa. Cerca del litoral, sin embargo, incluso una marea de amplitud modesta puede generar corrientes de marea importantes, especialmente cerca de una ensenada. Estas corrientes pueden causar interacciones intensas entre las olas y las corrientes junto al litoral, como los pronunciados efectos de refracción que se observan en esta imagen satelital.
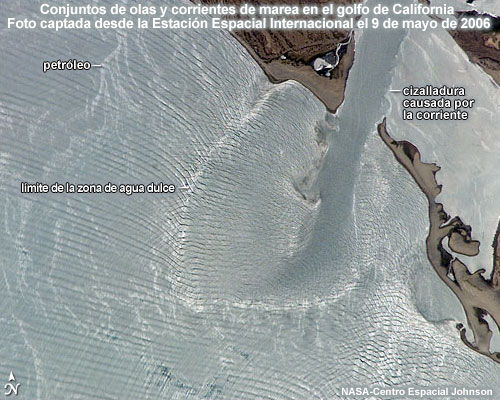
Por supuesto, las ensenadas son algunos de los lugares que más nos interesan en términos de navegación y comercio. Afortunadamente, comprendemos las interacciones entre las olas y las corrientes razonablemente bien y el modelo SWAN logra simularlas con bastante exactitud.
Ejemplo de una corriente
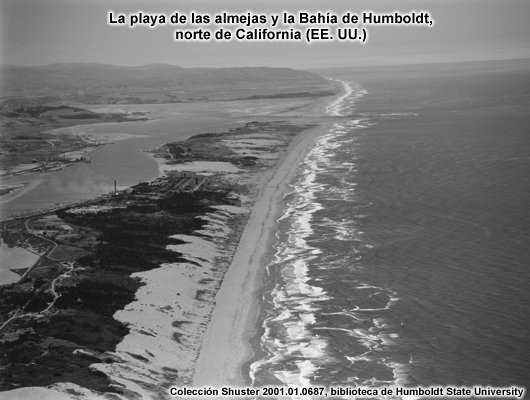
Por ejemplo, esta simulación del modelo SWAN de la secuencia de la marea en la entrada de la bahía de Humboldt, en el norte de California, muestra las predicciones de marea menguante máxima, repunte y marea creciente máxima. El panel de la izquierda presenta la altura significativa y la dirección principal de las olas. El sombreado de rayas indica zonas de condiciones de olas peligrosas (olas muy empinadas o rompientes). El panel de la derecha muestra la velocidad y dirección de la corriente.
Pregunta
¿Cuándo alcanzan su altura máxima las olas en la entrada de la bahía de Humboldt? (Elija la mejor respuesta.)
La respuesta correcta es a).
Cerca de la entrada de la bahía, las olas son más altas durante la marea menguante, cuando el agua sale de la bahía. Las condiciones de olas peligrosas abarcan toda la entrada a la bahía. La altura de las olas disminuye durante el repunte y aún más en la fase de marea creciente, cuando el agua entra en la bahía. Cuando entra la marea, las condiciones de olas peligrosas son mínimas.
Cuando los movimientos de las olas y de las corrientes se oponen entre sí, tanto la velocidad como la longitud de las olas disminuyen, mientras que la altura de las olas aumenta. El resultado son olas más empinadas y peligrosas. A la inversa, cuando la dirección de las olas y las corrientes coinciden, se produce el efecto opuesto: la velocidad y la longitud de onda aumentan, al tiempo que la altura de las olas disminuye.
Donde las olas encuentran una corriente se observa una gama de comportamientos que imitan los efectos batimétricos, como la refracción, el asomeramiento y la rotura de las olas. El modelo SWAN simula estos efectos.
Preguntas
Pregunta 1
¿Verdadero o falso? Aunque todos los modelos de olas cerca de la costa deben simular la difracción, en la mayoría de las circunstancias la refracción es relativamente poco importante.
La respuesta correcta es Falso.
Las olas se refractan y cambian de dirección si cuando alcanzan una zona de aguas someras las crestas de las olas no son paralelas a isóbatas. Por lo tanto, todos los modelos de olas cerca de la costa tienen en cuenta la refracción.
Pregunta 2
¿Verdadero o falso? El modelo SWAN toma en cuenta una gama de olas reflejadas, desde las muy coherentes hasta las muy dispersas.
La respuesta correcta es Verdadero.
SWAN puede tener en cuenta la rugosidad de la barrera reflectante, que representa el grado de coherencia de la reflexión.
Pregunta 3
¿Verdadero o falso? Es importante modelizar los efectos de las corrientes en las olas porque imitan los efectos de la batimetría, como la refracción y el asomeramiento.
La respuesta correcta es Verdadero.
Cuando las olas encuentran una corriente opuesta, su altura aumenta y su longitud de onda y velocidad disminuyen. Dada una corriente suficientemente impetuosa, las olas romperán.
Pregunta 4
¿Por qué es importante modelizar el efecto de las corrientes cerca de la costa? (Elija la mejor respuesta.)
La respuesta correcta es c).
Las corrientes intensas son bastante raras en alta mar, pero en zonas con amplitudes de marea incluso moderadas, y especialmente cerca de las ensenadas, las corrientes de marea fuertes son comunes.
Configuración del modelo SWAN
El modelo SWAN permite configurar una gama de opciones casi apabullante para cada corrida de simulación. Desde la perspectiva del usuario operativo, la mayoría de estas configuraciones parecen detalles de poca importancia. Sin embargo, es importante comprender cómo funciona el modelo, ya que saber interpretar los resultados y cuestionarlos cuando el modelo no funciona como nos esperamos mejora nuestra habilidad como usuarios.
Configuración del modelo SWAN
El modelo ofrece varias opciones para determinar el tipo de malla sobre el cual se ejecutará. La configuración depende de varios factores, como la facilidad de preparación y los tipos de anidamiento y acoplamiento del modelo.
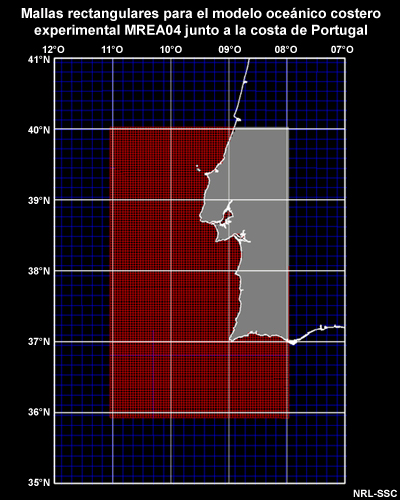
Por omisión, el modelo SWAN utiliza una malla rectangular uniforme, como la que se muestra en la figura. Esta malla se configura y se anida fácilmente en los modelos globales como WAM y WAVEWATCH III, que también usan mallas rectangulares uniformes. Por eso las mallas rectangulares son las más comunes.
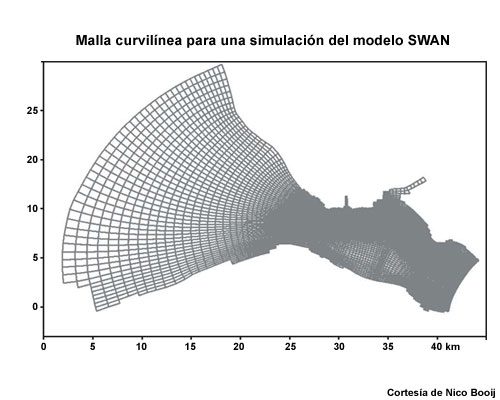
La malla curvilínea es un caso especial de malla rectangular. Las esquinas de todas las celdas de la malla forman ángulos rectos, pero los lados de las celdas pueden curvar. Algunas aplicaciones del modelo pueden beneficiarse del uso de una malla curvilínea. Por ejemplo, una bahía ancha y curvada producirá olas que atraviesan la bahía entera y refractan hacia los costados.
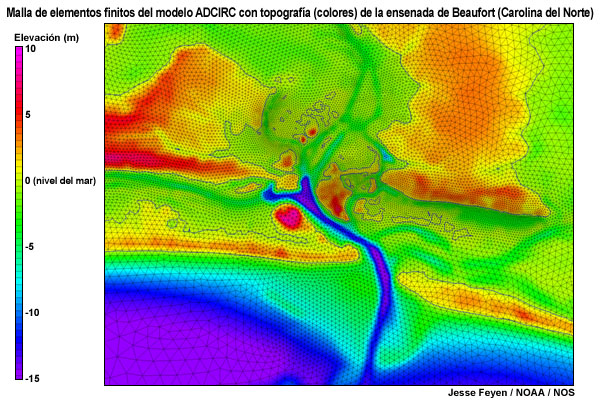
SWAN también permite utilizar mallas más complejas, irregulares o no estructuradas, como esta, que emplea un dominio del modelo de circulación avanzado (ADvanced CIRCulation, ADCIRC). Esta configuración es apropiada para acoplar el modelo de olas a un modelo de simulación del litoral que utiliza este tipo de malla. Por ejemplo, muchos modelos de predicción de corrientes, profundidad de la marea e inundaciones costeras utilizan mallas irregulares.
Fronteras y condiciones de frontera
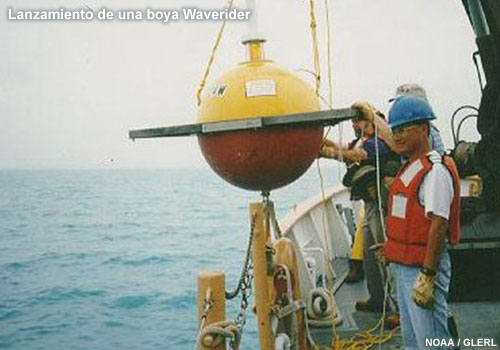
Para ejecutar un modelo como SWAN, es preciso comenzar con algunas condiciones de frontera, las cuales suelen provenir de dos fuentes: las observaciones de boyas o la salida de un modelo que utiliza un dominio más grande. Conocer el origen de las condiciones de frontera ayuda a definir las fronteras del dominio del modelo. Esta foto muestra una boya Waverider, cuyos datos permiten generar espectros de olas de alta resolución adecuados para determinar el campo de olas incidente.
Condiciones de frontera de boyas
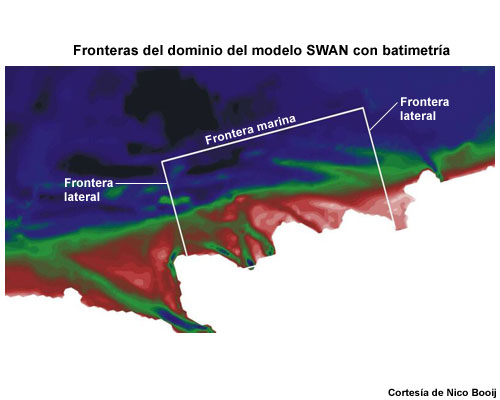
Cuando se utilizan los datos de boyas, normalmente las condiciones de frontera se aplican al borde del dominio del modelo que da al mar. Aquí, las condiciones son razonablemente constantes y las olas no se ven afectadas en gran medida por la batimetría. Esas condiciones de frontera no son válidas en las aguas someras cerca del litoral, de modo que el modelo se ejecuta sin que la energía de las olas entre en su dominio por los lados. Obviamente esto puede producir errores cerca de las fronteras laterales, según el rumbo de proveniencia de las olas.
Condiciones de frontera de otros modelos
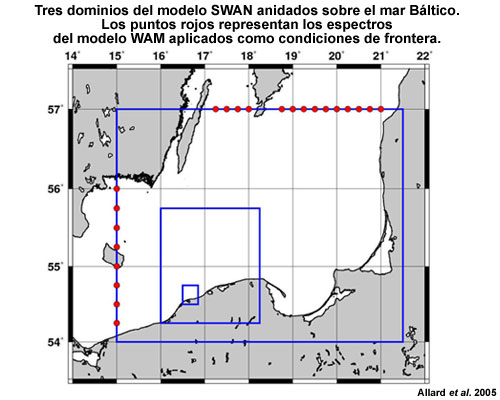
Cuando las condiciones de frontera provienen de los resultados de un modelo de dominio más grande que utiliza una malla más gruesa, hablamos de anidar el dominio de SWAN en el dominio más amplio. Para esta configuración, es preciso establecer la posición de la frontera del modelo de modo que abarque varias celdas de la malla más gruesa. Este ejemplo muestra tres dominios del modelo SWAN anidados en el dominio del modelo WAM global.
Una ventaja de este enfoque es que no supone la existencia de condiciones uniformes a lo largo de la frontera del modelo. También permite crear condiciones de frontera válidas en los costados del dominio del modelo SWAN (pero solo si el modelo más grueso tiene en cuenta los efectos batimétricos).
Existe también un enfoque híbrido que establece las condiciones de frontera inicializando el modelo SWAN con la salida de un solo punto de malla de un modelo global o regional. Esencialmente, este modo de proceder trata la salida de ese modelo como si fuera una boya virtual, con las consideraciones correspondientes para las fronteras del modelo.
Efectos de frontera: campo de viento
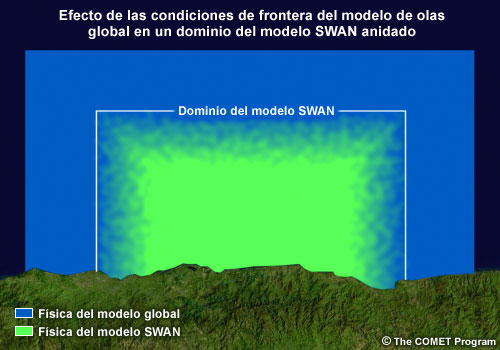
Independientemente de que la corrida del modelo SWAN se inicialice con las condiciones registradas por una boya o anidando el dominio en un modelo global, los efectos de la física del modelo SWAN no comienzan a sentirse sino a cierta distancia de las fronteras del modelo. Es importante recordar que cerca del borde de su dominio, los resultados del modelo SWAN reflejan más las condiciones de frontera que sus propias predicciones. Esto es particularmente importante en las zonas donde la frontera del modelo entra en la región de aguas someras.
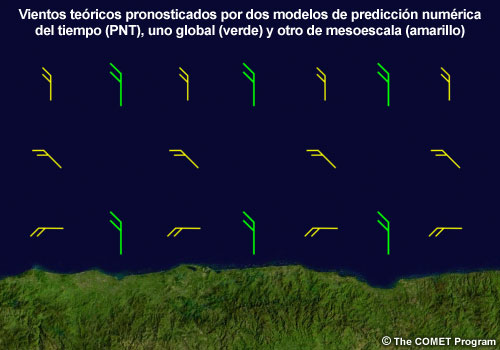
Efectos de frontera: anidamiento
Cuando se anida el modelo SWAN en un modelo global, es posible que los dos modelos apliquen criterios de forzamiento del viento diferentes. Los modelos globales de olas generan los vientos a partir de modelos meteorológicos globales, mientras que SWAN suele recibir los vientos de un modelo local de mesoescala. Cerca del litoral, es posible que los modelos meteorológicos global y de mesoescala no coincidan, lo cual puede producir un cambio marcado en el forzamiento del viento en la frontera del modelo SWAN. Vale la pena recalcar la importancia de no confiar en las predicciones del modelo SWAN cerca de las fronteras de su dominio.
Modos: estacionario y no estacionario
El modelo SWAN se puede ejecutar en dos modos fundamentalmente distintos: estacionario y no estacionario.
En modo estacionario, el modelo se arranca con las condiciones iniciales y ejecuta un cierto número de iteraciones, hasta que se alcance un estado uniforme. Llegado este punto, todos los términos de propagación y las fuentes y los sumideros de energía se encuentran en equilibrio. El número de iteraciones necesario varía según el tamaño y la complejidad del dominio del modelo.
Para ser válido, este enfoque requiere condiciones relativamente constantes durante el período necesario para que las olas se propaguen a través del dominio del modelo. Obviamente, esto se logra más fácilmente con un dominio pequeño. Cuando se utilizan dominios más grandes, es preciso examinar los cambios en los vientos, las corrientes y las mareas para determinar si se ha alcanzado un estado casi uniforme.
En modo no estacionario, SWAN se ejecuta de forma parecida a un modelo meteorológico con incrementos de tiempo. Este enfoque es más exigente en términos de cómputo, pero tiene en cuenta los cambios en las condiciones ambientales, como el viento, las corrientes y las mareas, así como los cambios en las condiciones cerca de las fronteras, como la llegada de un nuevo campo de oleaje. En términos generales, el modelo se ejecuta en modo no estacionario cuando se aplica a dominios grandes.
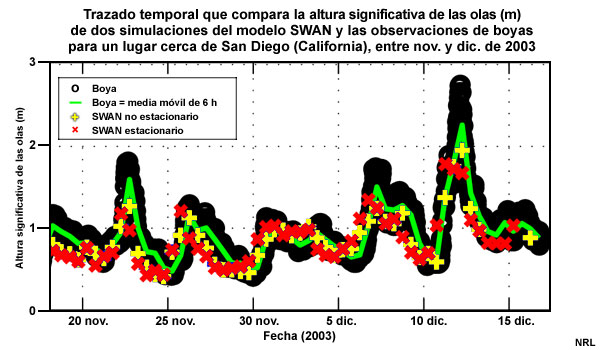
SWAN en modo estacionario: error de desfase
Cuando ejecutamos el modelo SWAN en modo estacionario, esperamos que se produzca un error como resultado del desfase temporal entre nuestra predicción instantánea y el momento de llegada real de las olas. Este trazado temporal compara los análisis de SWAN en modo estacionario y no estacionario con las observaciones de boyas para un lugar cerca de San Diego, California. El dominio de SWAN cubre toda la región del sur de California. Se nota que los episodios de olas entran y salen más temprano en la simulación del modelo en modo estacionario que en la simulación en modo no estacionario y en las observaciones de boyas.
Preguntas
Pregunta 1
¿Qué tipo de malla suele utilizarse al acoplar el modelo SWAN a un modelo de corrientes litorales o de inundaciones costeras? (Elija la mejor respuesta.)
La respuesta correcta es c).
Dado que los modelos de corrientes litorales o de inundaciones costeras requieren resoluciones muy altas para ser exactos, normalmente utilizan una malla de elementos finitos.
Pregunta 2
Normalmente, ¿a cuáles de las fronteras de un dominio del modelo se aplica la energía de las olas que incide en las boyas? (Elija la mejor respuesta.)
La respuesta correcta es a).
Normalmente, las condiciones iniciales de las boyas son válidas solamente en aguas profundas. Por eso suelen aplicarse al lado del dominio del modelo que da al mar, donde las aguas son profundas y la batimetría afecta muy poco las olas.
Pregunta 3
¿Cuál de estas fuentes se utiliza para inicializar los dominios anidados en el modelo? (Elija la mejor respuesta.)
La respuesta correcta es b).
Anidar significa colocar el dominio de un modelo de resolución más alta en el dominio de un modelo de resolución más baja. El dominio de resolución más alta obtiene sus condiciones iniciales del dominio de resolución más baja.
Pregunta 4
¿Dónde es probable que el pronóstico del modelo sea más exacto? (Elija la mejor respuesta.)
La respuesta correcta es b).
Es probable que las condiciones cerca de la frontera del dominio del modelo reflejen más las condiciones de frontera que las predicciones del modelo.
Pregunta 5
¿Qué significa ejecutar SWAN en modo estacionario? (Elija la mejor respuesta.)
La respuesta correcta es b).
El término estacionario se refiere a una sola corrida del modelo, no a un lugar o un incremento de tiempo uniforme.
Pregunta 6
Si ejecutamos el modelo SWAN en modo estacionario, ¿qué error debemos esperar en comparación con el modo no estacionario? (Elija la mejor respuesta.)
La respuesta correcta es a).
La predicción del modelo en modo estacionario es una predicción instantánea para todo el dominio. Cuando un oleaje alcanza el borde del dominio del modelo, la predicción instantánea no tiene en cuenta el tiempo necesario para que el oleaje atraviese el dominio del modelo. En un domino grande, este desfase temporal puede alcanzar varias horas.
Condiciones iniciales: ¿qué datos requiere una corrida del modelo SWAN?
Para ejecutar el modelo SWAN necesitamos inicializarlo con datos. Algunos de estos datos son imprescindibles, mientras que la necesidad de otros realmente depende de las condiciones locales y de los parámetros físicos que el modelo requiere para simular con exactitud las olas en ese lugar. Como mínimo, se necesitan los datos de batimetría y de vientos o de la energía de olas entrante. Los demás campos pueden o no ser imprescindibles, según el contexto geográfico del dominio del modelo.
Batimetría
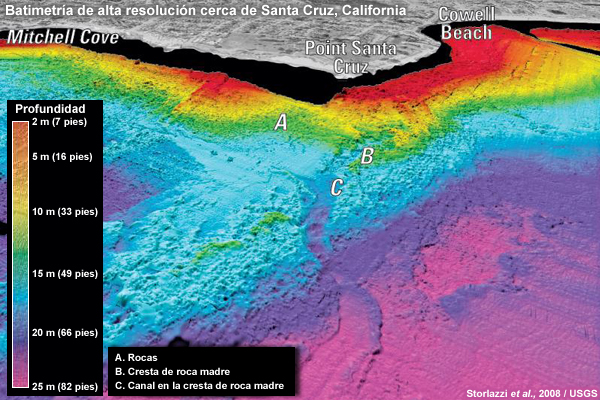
Lo que realmente separa los modelos de olas cerca de la costa de los que se usan en aguas profundas es el fondo marino. Para que la física de aguas someras del modelo SWAN sea exacta, la batimetría debe serlo también. Es más, dado que el modelo solo muestrea el fondo marino una vez en cada celda de la malla, el uso de una batimetría de alta resolución no dará mejores resultados a menos que se ejecute el modelo con un nivel de resolución equivalente. Este mapa, generado con los datos de un levantamiento batimétrico de alta resolución realizado recientemente con sonar, muestra la batimetría cerca de Punta Santa Cruz, en el norte de California. La clásica zona de rompiente conocida como Steamer’s Lane se debe a los arrecifes de roca madre que hay junto a la costa. Las letras indican la posición de ciertas características submarinas que no se describen en este contexto.
Errores de batimetría
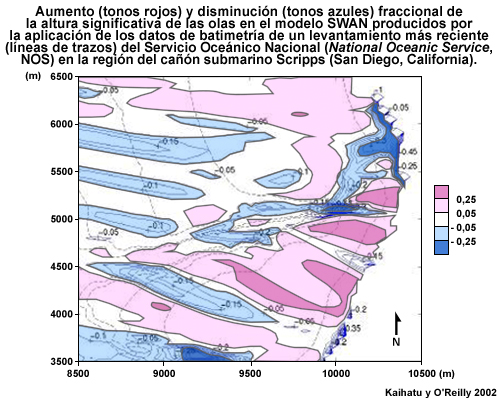
Un error relativamente menor en la batimetría puede provocar errores grandes en las predicciones. Por ejemplo, considere los dos levantamientos batimétricos del cañón submarino Scripps, cerca de San Diego (California), que se comparan en esta figura. Uno de los levantamientos se trazó con líneas continuas y el otro con líneas de trazos.
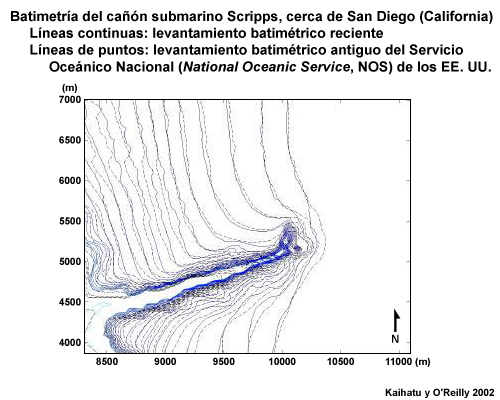
Las variaciones entre los dos parecen muy sutiles, pero en una simulación del modelo SWAN provocaron diferencias importantes en la altura de las olas. Esta gráfica muestra la diferencia fraccional en la altura de las olas provocada por la diferencia en los dos levantamientos batimétricos. Las variaciones exceden ampliamente el 25 %. Note que se trata de una costa rocosa; las diferencias de batimetría se deben casi exclusivamente a errores de medición, no a cambios en la batimetría. Ahora bien, si su zona de interés comprende barras de arena que cambian, es probable que la batimetría sea una fuente considerable de error en el modelo.
Las entradas o bocas de muchos puertos se dragan para eliminar la arena que se acumula en el lado protegido de los rompeolas. Los pronósticos para la boca de un puerto deben tener presente si el modelo refleja la batimetría anterior o posterior a las obras de dragado.
Olas entrantes
En la mayoría de los lugares costeros, el oleaje entrante aporta la mayor parte de la energía al dominio del modelo. En estos lugares, la energía de las olas entrantes es un dato absolutamente fundamental. Los mejores datos de olas son los datos espectrales, como estos.
Error en el espectro de las olas
Algunas áreas costeras son particularmente susceptibles a los efectos de la dirección de proveniencia del oleaje. Este es el caso en el sur de California, donde a menudo las olas tienen que encontrar un camino entre las islas antes de llegar al litoral continental. Desgraciadamente, los espectros de olas del modelo WAVEWATCH III de la NOAA usan un incremento direccional de 15 grados. Cuando se inicializa un modelo de olas cerca de la costa con estos datos espectrales, pueden producirse errores de pronóstico considerables en las áreas delante de las islas y en lugares donde la batimetría es compleja. SWAN puede aliviar el problema en cierta medida creando, para su propio uso, espectros de resolución más alta a partir de los de baja resolución.

Error en el espectro de las olas, continuación
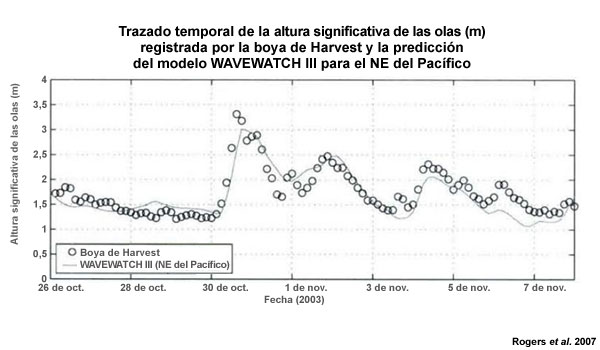
Algunos de los errores en las condiciones de frontera son bastante sutiles. Este trazado temporal compara la altura media de las olas registrada por la boya de Harvest, cerca de Punta Concepción, con los pronósticos a corto plazo de WAVEWATCH III para la misma zona. Aunque el modelo a veces sobreestima y a veces subestima las condiciones, en general las predicciones son bastante acertadas y el uso de estos datos para inicializar un modelo de olas cerca de la costa no debería constituir un problema.
Sin embargo, si analizamos solo el oleaje proveniente del sudoeste vemos que WAVEWATCH III sobreestima continuamente la altura de las olas.
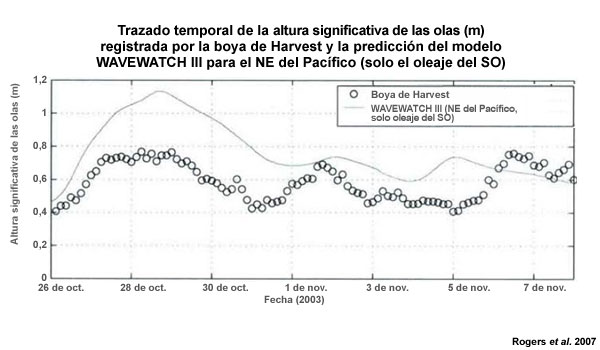
Dado que en general la altura media es razonablemente exacta, solo podemos concluir que durante este período WAVEWATCH III subestimó el oleaje del NO al tiempo que sobreestimó el oleaje del SO.
Pregunta
Dada esta información, ¿cree usted que las predicciones del modelo SWAN sobreestiman o subestiman la altura de las olas en la región cerca de San Diego?
La respuesta correcta es a).
SWAN sobreestima el oleaje cerca de San Diego. En el mapa, observe que la costa del sur de California entre Punta Concepción y San Diego está protegida por una serie de islas. La región delante de San Diego puede recibir oleaje del sudoeste, pero las islas bloquean el oleaje proveniente del noroeste.
Este trazado temporal de la altura de las olas en un lugar cerca de San Diego muestra que el modelo SWAN sobreestimó la altura de las olas a lo largo del período.
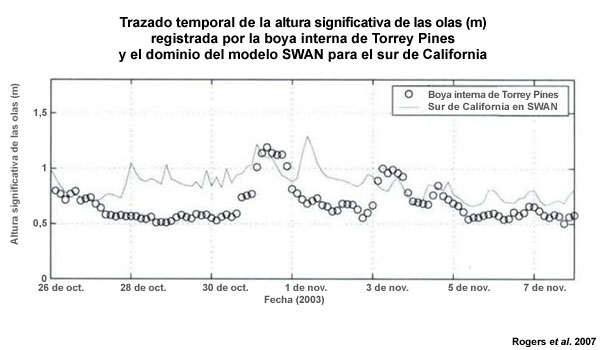
Este ejemplo nos enseña que al verificar los resultados de una corrida del modelo conviene no fijarse solamente en la media o la altura significativa de las olas. También es preciso examinar el espectro de olas, para cerciorarse de que el oleaje que tiene mayores probabilidades de azotar el área de interés esté representado en las condiciones iniciales del modelo de olas cerca de la costa.
Vientos
Aunque se suele utilizar un campo de viento para ejecutar el modelo SWAN, solo es imprescindible cuando constituye la única fuente de energía entrante. Por ejemplo, esta foto muestra olas de viento generadas localmente que rompen contra el litoral del lago Superior. En estas circunstancias, la inclusión del campo de viento es imprescindible.

Por otra parte, el viento se puede ignorar cuando el dominio del modelo es muy pequeño. Dada una zona de alcance del viento (fetch) muy corta, las olas de viento no alcanzarán alturas significativas. Este ejemplo muestra un pequeño dominio de SWAN anidado centrado en la entrada de la bahía de San Diego (California) que cubre una zona de aproximadamente 1,6 x 2,5 km. Dado que las olas atraviesan este dominio en cuestión de minutos, es poco probable que el viento las pueda alterar en un lapso tan corto.
Corrientes
En las regiones que se caracterizan por corrientes fuertes, las interacciones entre las olas y las corrientes pueden afectar profundamente la altura, el período y el peralte de las olas. Para los usuarios del modelo SWAN, estas interacciones son particularmente importantes en las ensenadas con amplitudes de marea grandes y, por tanto, corrientes de marea fuertes. La inclusión de los datos de corrientes en estas áreas mejora considerablemente los resultados del modelo.
Altura de las mareas
Las áreas que están sujetas a grandes mareas pueden presentar patrones de asomeramiento marcadamente distintos entre los extremos de la marea alta y la baja. Es posible que las olas pasen por encima de las barras de arena que causan el asomeramiento durante la pleamar, pero que rompan en bajamar, disipando la mayor parte de su energía en el proceso. Existen lugares en el mundo donde la bajamar puede vaciar una bahía entera, dejando expuestas grandes superficies de marisma, como en esta foto de una bahía en Alaska. Claramente, en un lugar como este es esencial incorporar la altura de las mareas para producir un pronóstico de olas acertado.

Variable de fricción de fondo
Uno de los sumideros de la energía de las olas en el modelo SWAN es la fricción de fondo. La mayoría de las costas tienen un fondo marino bastante uniforme, de limo o de arena.
Sin embargo, en los lugares donde la fricción de fondo es muy variable, especialmente cerca de los arrecifes coralinos, el coeficiente de arrastre puede variar a razón de un orden de magnitud en poca distancia. Varios estudios han demostrado que cuando las olas atraviesan una plataforma coralina, la fricción con el fondo causa la disipación de una cantidad de energía equivalente al romper de las olas. Dado que el parámetro de fricción de fondo por omisión del modelo SWAN es un fondo marino arenoso, es importante recordar que SWAN puede sobreestimar considerablemente la altura de las olas cerca de los arrecifes.

Preguntas
Pregunta 1
¿Verdadero o falso? La batimetría de alta resolución siempre mejora el pronóstico del modelo de olas.
La respuesta correcta es Falso.
Dado que el modelo solo muestrea el fondo marino una vez en cada celda de la malla, la batimetría de alta resolución no ayuda a menos que el modelo se ejecute con una resolución equivalente.
Pregunta 2
¿Verdadero o falso? Es probable que la batimetría sea una fuente considerable de error en el modelo solo si el área de interés comprende barras de arena que cambian.
La respuesta correcta es Verdadero.
Dado que una pequeña diferencia en la batimetría puede provocar errores de pronóstico grandes, es probable que la batimetría sea una fuente considerable de error en el modelo en las áreas que comprenden barras de arena que cambian.
Pregunta 3
Use los cuadros de selección para elegir la mejor respuesta para cada enunciado en términos de las condiciones de frontera:
En la mayoría de los lugares costeros, el campo de olas es imprescindible. Para un lago o un lugar aislado, el campo de viento es imprescindible. En las zonas costeras, las olas entrantes suelen aportar la mayor parte de la energía de las olas, mientras que en los lagos y los mares costeros aislados los vientos normalmente constituyen la única fuente de energía de las olas.
Pregunta 4
Use el cuadro de selección para elegir la mejor respuesta para el enunciado.
La respuesta correcta es «muy pequeño». Dada una zona de alcance o fetch lo suficientemente corta, las olas de viento no alcanzarán una altura significativa.
Pregunta 5
¿Cómo se ven afectadas las simulaciones del modelo de olas cerca de la costa por una amplitud de marea grande? (Elija todas las opciones pertinentes.)
Las respuestas correctas son a) y b).
Una amplitud de marea grande suele ir acompañada de corrientes de marea fuertes, las cuales pueden alterar profundamente la altura, el período y el peralte de las olas. El nivel de las mareas puede cambiar los patrones de asomeramiento o la posición de la línea costera, especialmente en regiones con batimetrías poco profundas.
Pregunta 6
¿Cómo se compara el coeficiente de arrastre de un fondo marino arenoso con el de un arrecife coralino? (Elija la mejor respuesta.)
La respuesta correcta es a).
Los estudios han demostrado que los coeficientes de arrastre de los arrecifes coralinos son aproximadamente diez veces mayores que los de un fondo marino arenoso.
El modelo Surf
Introducción
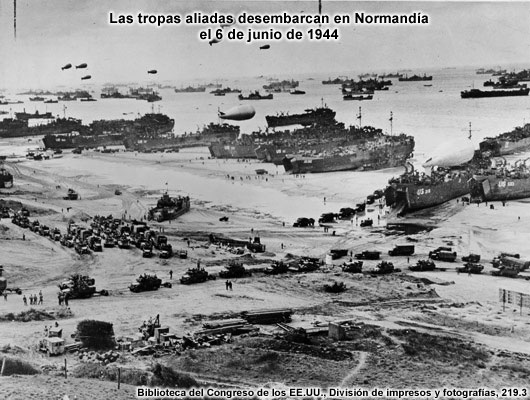
Las operaciones navales no se limitan a la navegación marítima. Las operaciones anfibias implican el movimiento de tropas y materiales a través de la zona de rompiente, ya sea al desembarcar o al emprender un viaje.
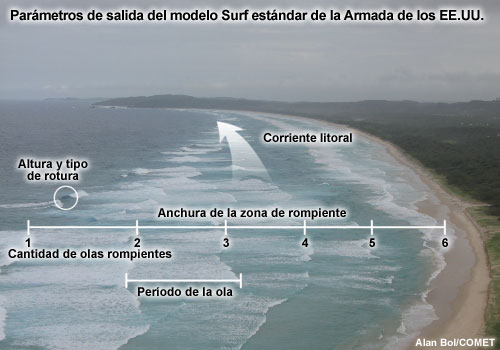
En este contexto, además de la altura significativa, el período y la dirección de las olas, necesitamos saber la altura de las olas rompientes, los tipos de rotura, la anchura de la zona de rompiente y la intensidad de la corriente litoral. Para obtener las respuestas a estas incógnitas, la armada estadounidense desarrolló el modelo Surf estándar (Navy Standard Surf Model). La versión actual de modelo se conoce como Surf 3.2.
¿En qué difieren los modelos Surf y SWAN?
- Surf es un modelo unidimensional (1D) de modo estacionario que simula las olas y las corrientes inducidas por las olas y las representa a lo largo de un perfil trazado en sentido perpendicular a la playa. A diferencia del modelo SWAN, Surf no modeliza toda la zona costera junto al litoral. Por otra parte, SWAN se puede ejecutar en modo estacionario 1D, como Surf.
- Ambos modelos utilizan una física similar, pero SWAN incluye las interacciones triples entre las olas que son importantes en aguas someras.
- SWAN calcula el aumento del nivel del mar inducido por las olas; Surf no calcula este valor.
- Surf calcula las corrientes litorales inducidas por las olas; SWAN no las calcula.
- Surf incluye la salida del modelo por omisión para los tipos de rotura en voluta (plunging), por descrestamiento (spilling) o por oscilación (surging), el índice de oleaje modificado (Modified Surf Index, MSI) y la anchura de la zona de rompiente.
- En el modelo SWAN se especifica una pendiente constante para la batimetría de entrada. Surf puede usar perfiles batimétricos más complejos que incluyen barras de arena a poca distancia del litoral.
Finalmente, aunque los modelos SWAN y Surf comparten ciertos aspectos, en términos generales son complementarios: el modelo Surf rellena los detalles de la zona de rompiente que no se obtienen con el modelo SWAN. Algunas implementaciones acoplan los dos modelos.
Salida del modelo
La Armada de los EE.UU. utiliza un formulario estándar para las observaciones y los pronósticos de oleaje. El modelo Surf toma en cuenta explícitamente todos los elementos de dicho formulario, que incluye los datos siguientes:
- la altura significativa de las olas rompientes
- el período de las olas rompientes
- el tipo de olas rompientes (porcentaje de rotura en voluta, por descrestamiento y por oscilación)
- el ángulo que forman las olas rompientes respecto de la playa
- la velocidad máxima de la corriente litoral
- la anchura de la zona de rompiente y la cantidad de olas rompientes que contiene
El modelo Surf calcula además el «índice de oleaje modificado» (Modified Surf Index, MSI), un valor único que da una idea de la dificultad de las operaciones anfibias en la zona de rompiente. Cada uno de los seis elementos antes enumerados contribuye al valor global. No se trata de una fórmula sencilla: cada aporte proviene de una tabla aparte que fue derivada empíricamente. Los distintos buques de desembarque se clasifican según el valor de MSI máximo bajo el cual pueden operar.
Productos gráficos y derivados
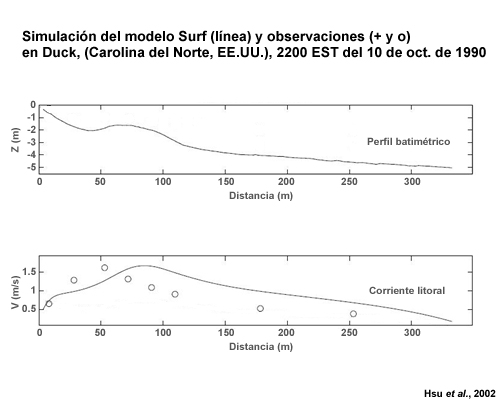
Este es un ejemplo de la salida generada por el modelo Surf.
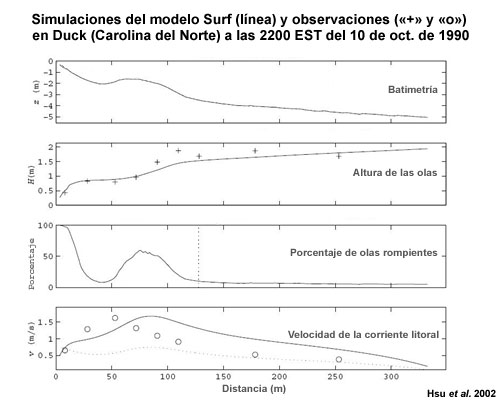
Como puede ver, Surf genera perfiles de las distintas propiedades del modelo, como:
- la profundidad del agua
- la altura de las olas
- el porcentaje de las olas que rompen
- las corrientes litorales en toda la zona de rompiente
Este ejemplo en concreto presenta los perfiles de un estudio de validación. La línea continua muestra las propiedades derivadas del modelo. Los círculos y las cruces corresponden a observaciones.
¿Cómo funciona el modelo?
La física del modelo Surf es similar a la que se utiliza en SWAN. En el modelo, conforme una ola se propaga a través de la zona de rompiente, su energía se disipa debido a la fricción de fondo, a las olas que rompen, a la turbulencia y a las interacciones entre las olas y las corrientes. El asomeramiento de las olas comienza cuando entran en la zona donde la profundidad es menor que la mitad de su longitud de onda: la longitud de onda disminuye al tiempo que la altura de las olas aumenta. La profundidad es el factor que induce la rotura de las olas, que ocurre cuando su altura excede aproximadamente el 80 % de la profundidad del agua. La física del modelo Surf produce resultados coherentes con las mediciones obtenidas en playas con y sin barras de arena junto al litoral.
Suposiciones del modelo
Como todos los modelos, Surf se basa en una serie de suposiciones.
La más importante es la suposición de que las isóbatas del fondo son rectas y paralelas a la línea costera. Dado que el modelo Surf calcula las condiciones de olas a lo largo de un perfil perpendicular al litoral, supone que las condiciones son exactamente iguales en todo el litoral, algo que normalmente requiere una playa larga y recta. Por lo tanto, los resultados del modelo Surf no son válidos si las olas entrantes se refractan por variaciones batimétricas complejas, se reflejan contra los cabos cercanos o se difractan alrededor de las obstrucciones.
El modelo también hace algunas suposiciones sobre las olas entrantes. El período y la dirección deben concentrarse en intervalos bastante reducidos. La altura de las olas debe ajustarse a una distribución de Rayleigh, como la de esta figura.
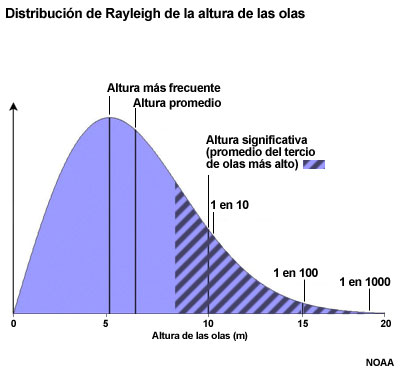
Dentro de lo razonable, en la mayoría de las condiciones estas suposiciones se cumplen. Sin embargo, es fácil imaginarse circunstancias en las que no se cumplirán. Por ejemplo, imagínese el caso en la costa oeste de los Estados Unidos donde las olas de viento del noroeste y el oleaje del sur producirían una pronunciada distribución bimodal de la altura, la dirección y el período de las olas.
Datos de entrada del modelo
Para ejecutar el modelo Surf se necesita información bastante básica:
- un perfil de profundidad
- la velocidad y dirección del viento
- las condiciones de las olas
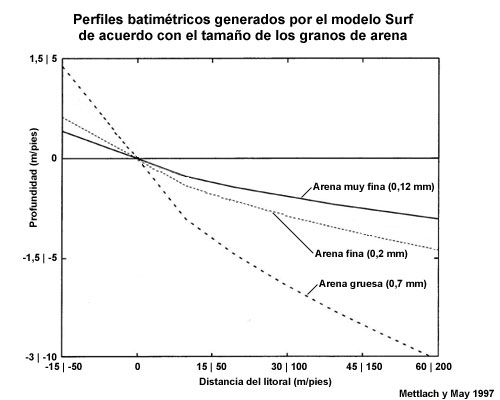
El perfil de profundidad se puede introducir directamente en el programa o derivar a partir de la elección del tamaño de los granos de arena predominante para la playa. Como muestra esta gráfica, cuanto más gruesa sea la arena, tanto más empinado será el perfil de profundidad.
Las condiciones de olas pueden provenir de diversas fuentes de datos. El modelo Surf acepta la salida de espectros direccionales de las olas de muchos otros modelos de oleaje, como SWAN y WAM. Alternativamente, es posible introducir manualmente los valores de altura, período y dirección de las olas. A partir de estos valores, el modelo Surf crea un espectro de olas coherente con sus suposiciones sobre la distribución de las alturas, los períodos y las direcciones de las olas.
Errores del modelo
Todos los modelos producen errores. Al fin y al cabo, un modelo es una mera aproximación numérica de procesos físicos muy complejos. Los estudios de validación del modelo Surf muestran que, dada la mejor información posible sobre el perfil de profundidad, las olas entrantes y los vientos, el índice MSI del modelo contiene un error aproximado del 20 %.
La mayor parte del error del modelo Surf se puede atribuir a la batimetría. Los errores de batimetría pueden duplicar el error del índice a más del 40 %. Debido a que la batimetría de una playa arenosa con barras puede cambiar a diario, el error aumenta con la antigüedad del perfil de profundidad. Por ejemplo, esta animación muestra el perfil de profundidad medido a diario cerca de una ciudad de Carolina del Norte. En el transcurso de una semana, el perfil de forma relativamente plana se transforma y muestra la formación de una barra. Por lo tanto, no es gran sorpresa que el modelo arroje resultados mejores si la batimetría se mide el mismo día en que se ejecuta el modelo.
El error más grande ocurre cuando se usan perfiles batimétricos basados en el tamaño de los sedimentos. En general, los errores son mayores en playas empinadas y menores en playas poco profundas.
En términos generales, cuando los errores en el pronóstico de oleaje son pequeños, también lo son los errores en la corriente litoral, con una excepción importante: cuando la playa contiene una barra, como en la ilustración siguiente, el modelo Surf tiende a colocar la corriente litoral máxima encima de la barra. Las observaciones típicamente ubican el máximo de la corriente en el lado de tierra de la barra, como se nota en el panel inferior del ejemplo. Este error puede tener implicancias importantes para las operaciones, por ejemplo, si el navegante calcula que la corriente litoral disminuirá al sobrepasar la barra.
Preguntas
Pregunta 1
¿Cuáles de estos datos son entradas obligatorias para ejecutar el modelo Surf? (Elija todas las opciones pertinentes.)
Las respuestas correctas son a), b) y c).
La información que requiere el modelo Surf para funcionar es bastante básica e incluye un perfil de profundidad, la velocidad y dirección del viento y las condiciones de olas. El modelo Surf pronostica las corrientes litorales inducidas por las olas.
Pregunta 2
¿Cuáles de estas son suposiciones del modelo Surf? (Elija todas las opciones pertinentes.)
Las respuestas correctas son a) y b).
El modelo Surf presupone que las isóbatas del fondo son rectas y paralelas a la línea costera. Dado que el modelo calcula las condiciones de olas a lo largo de un perfil perpendicular a la costa, supone que las condiciones son exactamente iguales en todo el litoral, algo que normalmente requiere una playa larga y recta.
El modelo también hace algunas suposiciones sobre las olas entrantes. El período y la dirección deben concentrarse en intervalos relativamente reducidos. La altura de las olas debe ajustarse a una distribución de Rayleigh. Dentro de lo razonable, en la mayoría de las condiciones estas suposiciones se cumplen.
Pregunta 3
¿Cuáles de estas son predicciones que hace el modelo Surf? (Elija todas las opciones pertinentes.)
Las respuestas correctas son a), b) y c).
El modelo Surf toma en cuenta explícitamente todos los elementos del formulario estándar de la Armada estadounidense para las observaciones y los pronósticos de oleaje, que incluye:
- la altura de las olas rompientes significativas,
- el período de las olas rompientes,
- el tipo de rotura (porcentaje de rotura en voluta, por descrestamiento y por oscilación.
El tamaño de los granos de arena y la ubicación de las barras de arena son datos de entrada del modelo Surf.
Pregunta 4
(Use los cuadros de selección para elegir las mejores respuestas para el enunciado.)
En comparación con el modelo SWAN, Surf pronostica las corrientes litorales, mientras que SWAN pronostica el aumento del nivel del mar inducido por las olas.
Pregunta 5
¿Cuál es la fuente de error principal en las predicciones del modelo Surf? (Elija la mejor respuesta.)
La respuesta correcta es c).
La mayor parte del error del modelo Surf se puede atribuir a la batimetría. Es más, dado que la batimetría de una playa arenosa con barra puede cambiar a diario, los errores también aumentan con la antigüedad del perfil de profundidad.
Resumen
Los modelos que simulan las olas cerca de la costa se pueden dividir en dos clases generales:
- modelos de resolución de fase y
- modelos espectrales.
Cada clase incluye modelos unidimensionales (1D) y bidimensionales (2D).
Los modelos de resolución de fase simulan cada una de las olas en el dominio del modelo. El Cuerpo de Ingenieros del Ejército de los Estados Unidos (U.S. Army Corps of Engineers, USACE) desarrolló un modelo de resolución de fase (Boussinesq) llamado Bouss-2D para uso en sus estudios de ingeniería.
SWAN es un modelo espectral bidimensional (2D). SWAN difiere de los modelos de olas en aguas profundas en varios aspectos:
- contiene la física que simula los procesos que ocurren en aguas someras;
- se ejecuta con resoluciones más altas para tener en cuenta las variaciones batimétricas;
- en términos numéricos, la propagación en SWAN es implícita (usa una técnica de parametrización) en lugar de ser explícita (una simulación);
- SWAN se ejecuta a menudo en un modo «estacionario» que se contrapone al modo de «incremento de tiempo».
Fuentes y sumideros de la energía de las olas en SWAN
SWAN representa el crecimiento de las olas por acción del viento, la atenuación de las olas por descrestamiento, la fricción de fondo y la rotura de las olas inducida por el cambio de profundidad y la transferencia no lineal de la energía de las olas a través de interacciones triples (entre tres olas) y cuádruples (entre cuatro olas).
Propagación de las olas en SWAN
En el modelo SWAN, la propagación de las olas pasa la energía de las olas de una celda de la malla a las celdas vecinas. Para lograrlo con precisión junto al litoral, el modelo SWAN debe tener en cuenta los efectos de la batimetría, los obstáculos y las corrientes. Si bien el modelo SWAN es capaz de aproximar los efectos de la difracción, normalmente no es necesario.
Un error pequeño en la batimetría puede provocar errores grandes en las predicciones de oleaje. Estos errores pueden deberse a errores de levantamiento o a cambios en la batimetría.
Configuración del modelo SWAN
Las condiciones iniciales del modelo SWAN suelen provenir de dos fuentes: las observaciones de boyas o una corrida de un modelo de dominio más grande. Normalmente, las condiciones de frontera de las boyas se aplican en el lado del dominio del modelo que da hacia el mar. SWAN también se puede anidar en un modelo de dominio más grande. Existe también un enfoque híbrido que establece las condiciones de frontera inicializando el modelo SWAN con la salida de un solo punto de malla de un modelo global o regional, como si se tratara de una boya virtual.
El modelo SWAN se puede ejecutar en dos modos: estacionario y no estacionario. El modo estacionario es menos exigente en términos de cómputo, pero requiere condiciones relativamente constantes durante el período que tardan las olas en propagarse a través del dominio del modelo. El modo no estacionario es más exigente en términos de cómputo, pero tiene en cuenta los cambios en las condiciones ambientales. Las corridas del modelo SWAN en modo estacionario son susceptibles a errores de desfase temporal.
Condiciones iniciales del modelo SWAN
Para ejecutar el modelo SWAN se necesitan condiciones iniciales de batimetría y de vientos o de la energía de olas entrante. La energía entrante de olas es un dato absolutamente imprescindible para la mayoría de los lugares costeros, aunque el viento se puede ignorar cuando el dominio del modelo es muy pequeño. El campo de viento es imprescindible cuando se trata de lagos o de mares aislados. Según el lugar, las simulaciones del modelo SWAN pueden incluir corrientes, mareas y fricción de fondo.
Los bordes del dominio del modelo son susceptibles a errores debido a cambios en las condiciones de frontera, a la batimetría y a la física del modelo.
El modelo Surf estándar de la armada estadounidense (Navy Standard Surf Model).
Surf difiere de SWAN en varios aspectos:
- Ambos modelos utilizan una física similar, pero SWAN incluye las interacciones triples entre las olas que son importantes en aguas someras.
- Surf calcula las corrientes litorales inducidas por las olas, mientras que SWAN calcula el aumento del nivel del mar inducido por las olas.
- Surf puede usar perfiles batimétricos más complejos que SWAN.
La salida del modelo Surf toma en cuenta todos los elementos del formulario estándar de la Armada estadounidense para las observaciones. La salida gráfica del modelo Surf muestra la profundidad del agua, la altura de las olas, el porcentaje de las olas que rompen y las corrientes litorales.
Surf presupone que las isóbatas del perfil de profundidades del fondo son rectas y paralelas a la línea costera, lo cual normalmente requiere una playa larga y recta.
La mayor parte del error de Surf se puede atribuir a la batimetría.
Referencias bibliográficas
Allard, R., Rogers, W. E., Carroll, S. N. y Rushing, K. V., 2004: Validation Test Report for the Simulating Waves Nearshore Model (SWAN) Cycle III, Version 40.11
NRL Final Report NRL/FR/7320--04-10,070 [http://handle.dtic.mil/100.2/ADA426578]
Allard, R., Dykes, J., Kaihatu, J. y Wakeham, D., 2005: DIOPS: A PC-Based Wave, Tide and Surf Prediction System. NRL contribution NRL/PP/7320/04/5013, 7 págs.
[comprobado el 3 de diciembre de 2008 en http://handle.dtic.mil/100.2/ADA432398]
Booij, N., Ris, R. C., y Holthuijsen, L. H., 1999: A third-generation wave model for coastal regions 1. Model description and validation. Journal of Geophysical Research, Volume 104, Issue C4, págs. 7649-7666
Bretschneider, C. L. 1970: Forecasting relations for wave generation. Look Lab/Hawaii, 1, 3.
Christie, G., 2006: The SWANSURF Wave Model: Implementation and User Manual.
DSTO-GD-0475, Maritime Operations Division, Defence Science and Technology Organisation, Australia
Hsu, Y. L., Mettlach, T. R. y Earle, M. D., 2002: Validation Test Report for the Navy Standard Surf Model. Naval Research Laboratory Formal Report NRL/FR/7322--02-10,008
[
http://handle.dtic.mil/100.2/ADA403725]
Kaihatu, J. M. y O’Reilly, W. C., 2002: Model Predictions and Sensitivity Analysis of Nearshore Processes over Complex Bathymetry. Proceedings of the 7th International workshop of wave hindcasting and forecasting, Banff, Alberta, págs. 385-396.
[
www.waveworkshop.org/7thWaves/Papers/Kaihatu_OReilly.pdf]
Mettlach, T. R. y May, D. A., 1997: The Accuracy of the Navy-Standard Surf Model-Derived Modified Surf Index and its Sensitivity to Nearshore Bathymetric Profile Errors. Naval Research Laboratory Formal Report NRL/FR/7240--97-9665
[http://handle.dtic.mil/100.2/ADA331685]
Monismith, S.G., 2007: Hydrodynamics of Coral Reefs. Annual Reviews of Fluid Mechanics, 39, págs. 37–55. [http://arjournals.annualreviews.org/doi/pdf/10.1146/annurev.fluid.38.050304.092125]
Nwogu, O. G. y Demirbilek, Z.: BOUSS-2D: A Boussinesq Wave Model for Coastal Regions and Harbors, Report 1, Theoretical Background and Users’ manual. USACE Coastal and Hydraulics Laboratory. ERDC/CHL TR-01-25. Septiembre de 2001
Peak , S. D., 2004: Wave refraction over complex nearshore bathymetry
Master's thesis, Naval Postgraduate School, Monterey, CA
[http://handle.dtic.mil/100.2/ADA429926]
Rogers, W. E., Kaihatu, J. M., Hsu, L., Jensen, R. E., Dykes, J. D. y Holland, K. T., 2007: Forecasting and hindcasting waves with the SWAN model in the Southern California Bight. Coastal Engineering, 54, 1-15.
[Disponible en http://handle.dtic.mil/100.2/ADA470369]
Storlazzi, C.D., Golden, N.E. y Finlayson, D.P., 2008: Views of the Sea Floor in Northern Monterey Bay, California. U.S.G.S. Scientific Investigations Map 3007
SWAN User manual, SWAN Cycle III version 40.72A
(SWAN team, Delft University of Technology)
[http://vlm089.citg.tudelft.nl/swan/ ]
Colaboradores
Patrocinadores de COMET
MetEd y The COMET® Program forman parte de los Programas de la Comunidad de UCAR (University Corporation for Atmospheric Research Community Programs, UCP) y están patrocinados por el National Weather Service (NWS) de la NOAA, con fondos adicionales de las siguientes organizaciones:
- Bureau of Meteorology of Australia (BoM)
- Bureau of Reclamation, United States Department of the Interior
- European Organisation for the Exploitation of Meteorological Satellites (EUMETSAT)
- Meteorological Service of Canada (MSC)
- NOAA's National Environmental Satellite, Data and Information Service (NESDIS)
- NOAA's National Geodetic Survey (NGS)
- Naval Meteorology and Oceanography Command (NMOC)
- U.S. Army Corps of Engineers (USACE)
Para aprender más sobre nuestra organización, visite la página web de COMET.
Colaboradores del proyecto
Asesor científico principal
- Dr. Nico Booij — Digital Hydraulics Holland
Asesores científicos adicionales
- Rob Balfour — NWS San Diego
- Charlie Fox — U.S. Navy, NSW METOC
- Rodney Jacques — U.S. Navy, PDD Pacific
- Ted Mackechnie — NWS San Diego
- Dr. Erick Rogers — Naval Research Laboratory
Jefe del proyecto/diseño instruccional
- Dr. Alan Bol — UCAR/COMET
Diseño gráfico y de interfaz
- Steve Deyo — UCAR/COMET
- Brannan McGill — UCAR/COMET
Diseño multimedia
- Dan Riter — UCAR/COMET
Producción y edición de audio
- Seth Lamos — UCAR/COMET
Narración en inglés
- Tia Marlier
Traducción al español
- David Russi — UCAR/COMET
Revisión de la versión en español
- Rosario Alfaro — UCAR/COMET
Personal de COMET, enero de 2009
Director
- Dr. Timothy Spangler
Subdirector
- Dr. Joe Lamos
Administración
- Elizabeth Lessard, gerenta comercial y administrativa
- Lorrie Alberta
- Michelle Harrison
- Hildy Kane
Soporte de hardware/software y programación
- Tim Alberta, gerente de grupo
- Bob Bubon
- James Hamm
- Ken Kim
- Mark Mulholland
- Wade Pentz, estudiante
- Jay Shollenberger, estudiante
- Malte Winkler
Diseño instruccional
- Dr. Patrick Parrish, gerente principal de proyectos
- Dr. Alan Bol
- Lon Goldstein
- Bryan Guarente
- Dra. Vickie Johnson
- Tsvetomir Ross-Lazarov
- Marianne Weingroff
Grupo de producción multimedia
- Bruce Muller, gerente de grupo
- Steve Deyo
- Seth Lamos
- Brannan McGill
- Dan Riter
- Carl Whitehurst
Meteorólogos/Científicos
- Dr. Greg Byrd, gerente principal de proyectos
- Wendy Schreiber-Abshire, gerenta principal de proyectos
- Dr. William Bua
- Patrick Dills
- Dr. Stephen Jascourt
- Matthew Kelsch
- Dolores Kiessling
- Dra. Arlene Laing
- Dra. Elizabeth Mulvihill Page
- Amy Stevermer
- Warren Rodie
- Dr. Doug Wesley
Redacción científica
- Jennifer Frazer
Traducción al español
- David Russi
NOAA/National Weather Service - Forecast Decision Training Branch
- Anthony Mostek, jefe de la unidad
- Dr. Richard Koehler, jefe de entrenamiento hidrológico
- Brian Motta, entrenamiento IFPS
- Dr. Robert Rozumalski, coordinador de SOO Science and Training Resource (SOO/STRC)
- Ross Van Til, meteorólogo
- Shannon White, Entrenamiento AWIPS
Meteorólogos visitantes del Servicio Meteorológico de Canadá (MSC)
- Phil Chadwick
- Jim Murtha